Numba¶
In addition to what’s in Anaconda, this lecture will need the following libraries:
!pip install --upgrade quantecon
Please also make sure that you have the latest version of Anaconda, since old versions are a common source of errors.
Let’s start with some imports:
import numpy as np
import quantecon as qe
import matplotlib.pyplot as plt
%matplotlib inline
/usr/share/miniconda3/envs/qe-example/lib/python3.7/site-packages/numba/np/ufunc/parallel.py:363: NumbaWarning: The TBB threading layer requires TBB version 2019.5 or later i.e., TBB_INTERFACE_VERSION >= 11005. Found TBB_INTERFACE_VERSION = 9107. The TBB threading layer is disabled.
warnings.warn(problem)
Overview¶
In an earlier lecture we learned about vectorization, which is one method to improve speed and efficiency in numerical work.
Vectorization involves sending array processing operations in batch to efficient low-level code.
However, as discussed previously, vectorization has several weaknesses.
One is that it is highly memory-intensive when working with large amounts of data.
Another is that the set of algorithms that can be entirely vectorized is not universal.
In fact, for some algorithms, vectorization is ineffective.
Fortunately, a new Python library called Numba solves many of these problems.
It does so through something called just in time (JIT) compilation.
The key idea is to compile functions to native machine code instructions on the fly.
When it succeeds, the compiled code is extremely fast.
Numba is specifically designed for numerical work and can also do other tricks such as multithreading.
Numba will be a key part of our lectures — especially those lectures involving dynamic programming.
This lecture introduces the main ideas.
Compiling Functions¶
As stated above, Numba’s primary use is compiling functions to fast native machine code during runtime.
An Example¶
Let’s consider a problem that is difficult to vectorize: generating the trajectory of a difference equation given an initial condition.
We will take the difference equation to be the quadratic map
In what follows we set
α = 4.0
Here’s the plot of a typical trajectory, starting from \(x_0 = 0.1\), with \(t\) on the x-axis
def qm(x0, n):
x = np.empty(n+1)
x[0] = x0
for t in range(n):
x[t+1] = α * x[t] * (1 - x[t])
return x
x = qm(0.1, 250)
fig, ax = plt.subplots()
ax.plot(x, 'b-', lw=2, alpha=0.8)
ax.set_xlabel('$t$', fontsize=12)
ax.set_ylabel('$x_{t}$', fontsize = 12)
plt.show()
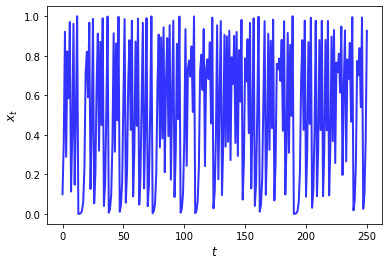
Notice the “chaotic” nature of the trajectory — an excellent discussion of these kinds of systems can be found in [LM13].
To speed the function qm up using Numba, our first step is
from numba import jit
qm_numba = jit(qm)
The function qm_numba is a version of qm that is “targeted” for
JIT-compilation.
We will explain what this means momentarily.
Let’s time and compare identical function calls across these two
versions, starting with the original function qm:
n = 10_000_000
qe.tic()
qm(0.1, int(n))
time1 = qe.toc()
TOC: Elapsed: 0:00:9.62
Now let’s try qm\_numba
qe.tic()
qm_numba(0.1, int(n))
time2 = qe.toc()
TOC: Elapsed: 0:00:0.22
This is already a massive speed gain.
In fact, the next time and all subsequent times it runs even faster as the function has been compiled and is in memory:
qe.tic()
qm_numba(0.1, int(n))
time3 = qe.toc()
TOC: Elapsed: 0:00:0.05
time1 / time3 # Calculate speed gain
169.9616843878303
This kind of speed gain is huge relative to how simple and clear the implementation is.
How and When it Works¶
Numba attempts to generate fast machine code using the infrastructure provided by the LLVM Project.
It does this by inferring type information on the fly.
(See our earlier lecture on scientific computing for a discussion of types.)
The basic idea is this:
Python is very flexible and hence we could call the function [qm]{.title-ref} with many types.
e.g.,
x0could be a NumPy array or a list,ncould be an integer or a float, etc.
This makes it hard to pre-compile the function.
However, when we do actually call the function, say by executing
qm(0.5, 10), the types ofx0andnbecome clear.Moreover, the types of other variables in
qmcan be inferred once the input is known.So the strategy of Numba and other JIT compilers is to wait until this moment, and then compile the function.
That’s why it is called “just-in-time” compilation.
Note that, if you make the call qm(0.5, 10) and then follow it with
qm(0.9, 20), compilation only takes place on the first call.
The compiled code is then cached and recycled as required.
Decorators and “nopython” Mode¶
In the code above we created a JIT compiled version of qm via the call
qm_numba = jit(qm)
In practice this would typically be done using an alternative decorator syntax.
(We will explain all about decorators in a later lecture but you can skip the details at this stage.)
Let’s see how this is done.
Decorator Notation¶
To target a function for JIT compilation we can put @jit before the
function definition.
Here’s what this looks like for qm
@jit
def qm(x0, n):
x = np.empty(n+1)
x[0] = x0
for t in range(n):
x[t+1] = α * x[t] * (1 - x[t])
return x
This is equivalent to qm = jit(qm).
The following now uses the jitted version:
qm(0.1, 10)
array([0.1 , 0.36 , 0.9216 , 0.28901376, 0.82193923,
0.58542054, 0.97081333, 0.11333925, 0.40197385, 0.9615635 ,
0.14783656])
Type Inference and “nopython” Mode¶
Clearly type inference is a key part of JIT compilation.
As you can imagine, inferring types is easier for simple Python objects (e.g., simple scalar data types such as floats and integers).
Numba also plays well with NumPy arrays.
In an ideal setting, Numba can infer all necessary type information.
This allows it to generate native machine code, without having to call the Python runtime environment.
In such a setting, Numba will be on par with machine code from low-level languages.
When Numba cannot infer all type information, some Python objects are given generic object status and execution falls back to the Python runtime.
When this happens, Numba provides only minor speed gains or none at all.
We generally prefer to force an error when this occurs, so we know effective compilation is failing.
This is done by using either @jit(nopython=True) or, equivalently,
@njit instead of @jit.
For example,
from numba import njit
@njit
def qm(x0, n):
x = np.empty(n+1)
x[0] = x0
for t in range(n):
x[t+1] = 4 * x[t] * (1 - x[t])
return x
Compiling Classes¶
As mentioned above, at present Numba can only compile a subset of Python.
However, that subset is ever expanding.
For example, Numba is now quite effective at compiling classes.
If a class is successfully compiled, then its methods act as JIT-compiled functions.
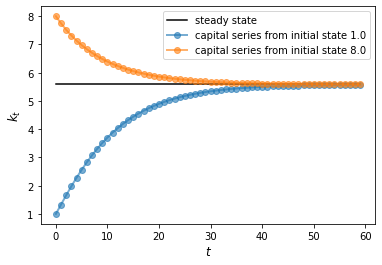
To give one example, let’s consider the class for analyzing the Solow growth model we created in this lecture.
To compile this class we use the @jitclass decorator:
from numba import jitclass, float64
Notice that we also imported something called float64.
This is a data type representing standard floating point numbers.
We are importing it here because Numba needs a bit of extra help with types when it trys to deal with classes.
Here’s our code:
solow_data = [
('n', float64),
('s', float64),
('δ', float64),
('α', float64),
('z', float64),
('k', float64)
]
@jitclass(solow_data)
class Solow:
r"""
Implements the Solow growth model with the update rule
k_{t+1} = [(s z k^α_t) + (1 - δ)k_t] /(1 + n)
"""
def __init__(self, n=0.05, # population growth rate
s=0.25, # savings rate
δ=0.1, # depreciation rate
α=0.3, # share of labor
z=2.0, # productivity
k=1.0): # current capital stock
self.n, self.s, self.δ, self.α, self.z = n, s, δ, α, z
self.k = k
def h(self):
"Evaluate the h function"
# Unpack parameters (get rid of self to simplify notation)
n, s, δ, α, z = self.n, self.s, self.δ, self.α, self.z
# Apply the update rule
return (s * z * self.k**α + (1 - δ) * self.k) / (1 + n)
def update(self):
"Update the current state (i.e., the capital stock)."
self.k = self.h()
def steady_state(self):
"Compute the steady state value of capital."
# Unpack parameters (get rid of self to simplify notation)
n, s, δ, α, z = self.n, self.s, self.δ, self.α, self.z
# Compute and return steady state
return ((s * z) / (n + δ))**(1 / (1 - α))
def generate_sequence(self, t):
"Generate and return a time series of length t"
path = []
for i in range(t):
path.append(self.k)
self.update()
return path
/usr/share/miniconda3/envs/qe-example/lib/python3.7/site-packages/ipykernel_launcher.py:10: NumbaDeprecationWarning: The 'numba.jitclass' decorator has moved to 'numba.experimental.jitclass' to better reflect the experimental nature of the functionality. Please update your imports to accommodate this change and see https://numba.pydata.org/numba-doc/latest/reference/deprecation.html#change-of-jitclass-location for the time frame.
# Remove the CWD from sys.path while we load stuff.
First we specified the types of the instance data for the class in
solow_data.
After that, targeting the class for JIT compilation only requires adding
@jitclass(solow_data) before the class definition.
When we call the methods in the class, the methods are compiled just like functions.
s1 = Solow()
s2 = Solow(k=8.0)
T = 60
fig, ax = plt.subplots()
# Plot the common steady state value of capital
ax.plot([s1.steady_state()]*T, 'k-', label='steady state')
# Plot time series for each economy
for s in s1, s2:
lb = f'capital series from initial state {s.k}'
ax.plot(s.generate_sequence(T), 'o-', lw=2, alpha=0.6, label=lb)
ax.set_ylabel('$k_{t}$', fontsize=12)
ax.set_xlabel('$t$', fontsize=12)
ax.legend()
plt.show()
Alternatives to Numba¶
There are additional options for accelerating Python loops.
Here we quickly review them.
However, we do so only for interest and completeness.
If you prefer, you can safely skip this section.
Cython¶
Like Numba, Cython provides an approach to generating fast compiled code that can be used from Python.
As was the case with Numba, a key problem is the fact that Python is dynamically typed.
As you’ll recall, Numba solves this problem (where possible) by inferring type.
Cython’s approach is different — programmers add type definitions directly to their “Python” code.
As such, the Cython language can be thought of as Python with type definitions.
In addition to a language specification, Cython is also a language translator, transforming Cython code into optimized C and C++ code.
Cython also takes care of building language extensions — the wrapper code that interfaces between the resulting compiled code and Python.
While Cython has certain advantages, we generally find it both slower and more cumbersome than Numba.
Interfacing with Fortran via F2Py¶
If you are comfortable writing Fortran you will find it very easy to create extension modules from Fortran code using F2Py.
F2Py is a Fortran-to-Python interface generator that is particularly simple to use.
Robert Johansson provides a nice introduction to F2Py, among other things.
Recently, a Jupyter cell magic for Fortran has been developed — you might want to give it a try.
Summary and Comments¶
Let’s review the above and add some cautionary notes.
Limitations¶
As we’ve seen, Numba needs to infer type information on all variables to generate fast machine-level instructions.
For simple routines, Numba infers types very well.
For larger ones, or for routines using external libraries, it can easily fail.
Hence, it’s prudent when using Numba to focus on speeding up small, time-critical snippets of code.
This will give you much better performance than blanketing your Python
programs with @jit statements.
A Gotcha: Global Variables¶
Here’s another thing to be careful about when using Numba.
Consider the following example
a = 1
@jit
def add_a(x):
return a + x
print(add_a(10))
11
a = 2
print(add_a(10))
11
Notice that changing the global had no effect on the value returned by the function.
When Numba compiles machine code for functions, it treats global variables as constants to ensure type stability.
Exercises¶
Exercise 1¶
Previously we considered how to approximate \(\pi\) by Monte Carlo.
Use the same idea here, but make the code efficient using Numba.
Compare speed with and without Numba when the sample size is large.
Exercise 2¶
In the Introduction to Quantitative Economics with Python lecture series you can learn all about finite-state Markov chains.
For now, let’s just concentrate on simulating a very simple example of such a chain.
Suppose that the volatility of returns on an asset can be in one of two regimes — high or low.
The transition probabilities across states are as follows
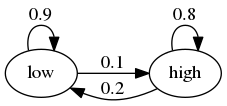
For example, let the period length be one day, and suppose the current state is high.
We see from the graph that the state tomorrow will be
high with probability 0.8
low with probability 0.2
Your task is to simulate a sequence of daily volatility states according to this rule.
Set the length of the sequence to n = 1_000_000 and start in the high
state.
Implement a pure Python version and a Numba version, and compare speeds.
To test your code, evaluate the fraction of time that the chain spends in the low state.
If your code is correct, it should be about 2/3.
Hints:
Represent the low state as 0 and the high state as 1.
If you want to store integers in a NumPy array and then apply JIT compilation, use
x = np.empty(n, dtype=np.int_).
Solutions¶
Exercise 1¶
Here is one solution:
from random import uniform
@njit
def calculate_pi(n=1_000_000):
count = 0
for i in range(n):
u, v = uniform(0, 1), uniform(0, 1)
d = np.sqrt((u - 0.5)**2 + (v - 0.5)**2)
if d < 0.5:
count += 1
area_estimate = count / n
return area_estimate * 4 # dividing by radius**2
Now let’s see how fast it runs:
%time calculate_pi()
CPU times: user 235 ms, sys: 0 ns, total: 235 ms
Wall time: 235 ms
3.142516
%time calculate_pi()
CPU times: user 12.3 ms, sys: 3.89 ms, total: 16.2 ms
Wall time: 16.2 ms
3.14264
If we switch of JIT compilation by removing @njit, the code takes
around 150 times as long on our machine.
So we get a speed gain of 2 orders of magnitude–which is huge–by adding four characters.
Exercise 2¶
We let
0 represent “low”
1 represent “high”
p, q = 0.1, 0.2 # Prob of leaving low and high state respectively
Here’s a pure Python version of the function
def compute_series(n):
x = np.empty(n, dtype=np.int_)
x[0] = 1 # Start in state 1
U = np.random.uniform(0, 1, size=n)
for t in range(1, n):
current_x = x[t-1]
if current_x == 0:
x[t] = U[t] < p
else:
x[t] = U[t] > q
return x
Let’s run this code and check that the fraction of time spent in the low state is about 0.666
n = 1_000_000
x = compute_series(n)
print(np.mean(x == 0)) # Fraction of time x is in state 0
0.666925
This is (approximately) the right output.
Now let’s time it:
qe.tic()
compute_series(n)
qe.toc()
TOC: Elapsed: 0:00:1.13
1.1383864879608154
Next let’s implement a Numba version, which is easy
from numba import jit
compute_series_numba = jit(compute_series)
Let’s check we still get the right numbers
x = compute_series_numba(n)
print(np.mean(x == 0))
0.665653
Let’s see the time
qe.tic()
compute_series_numba(n)
qe.toc()
TOC: Elapsed: 0:00:0.01
0.011542558670043945
This is a nice speed improvement for one line of code!
- LM13
Andrzej Lasota and Michael C Mackey. Chaos, fractals, and noise: stochastic aspects of dynamics. Volume 97. Springer Science & Business Media, 2013.